
- 나뭇잎의 팔랑임에서 영감, 로봇 분야 권위지 〈사이언스 로보틱스〉 게재
- 해상 기름 유출 등 해양 환경 문제 해결에 적용 가능한 새로운 개념 제시
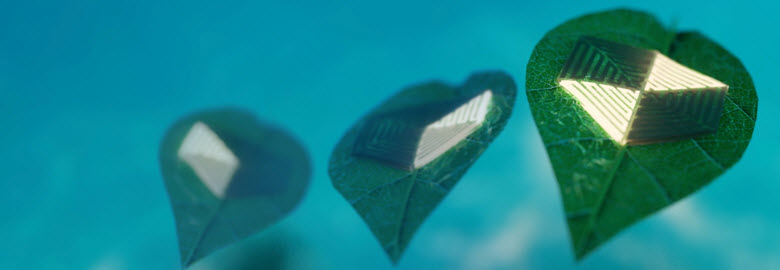
▲ 나뭇잎의 팔랑거리는 낙하운동에서 영감을 받아 제작된 헤엄치는 나뭇잎 로봇의 모식도

▲ (첫째줄 왼쪽부터) 서울대 기계공학부 조규진 교수, 독일 막스플랑크 연구소 변정환 박사 후 연구원, 서울대 박민조 연구원, 백상민 연구원, 김웅배 연구원. (둘째줄 왼쪽부터) 서울대 전기정보공학부 홍용택 교수, 윤재영 연구원, 이병문 박사
서울대학교 공과대학(학장 차국헌)은 기계공학부 조규진(인간중심 소프트로봇기술연구센터장) 교수 공동 연구팀이 종이처럼 얇은 수중 소프트 로봇 기술을 개발했다고 22일 밝혔다.
연구진은 얇은 피부 형태의 밀도 분포 제어 기술을 개발하여 종이처럼 얇은 구조의 새로운 수중 거동 형태를 만들어내는 데 성공했다. 이 성과는 수중 소프트 로봇의 새로운 형태와 기능성을 제시한 연구로 인정받아 로봇 분야 세계적 권위지인 〈사이언스 로보틱스(Science Robotics)〉에 4월 21일 자로 게재되었다.
연구진은 일상적으로 누구나 쉽게 접할 수 있는 현상인 ‘나뭇잎이 공기 중에서 팔랑이며 낙하하는 운동’에서 핵심 원리에 대한 영감을 얻었다. 나뭇잎 또는 종이와 같이 가볍고 얇은 물체는 공기 저항에 의해 특별한 추진력 없이도 다채로운 움직임을 만들어낸다.
연구진은 이 움직임이 물체의 밀도 분포에 크게 의존하고, 수중 환경에서는 이 효과가 한층 더 극대화되는 점을 규명했다. 더 나아가 열에 반응하면 큰 폭으로 밀도가 변하는 연성 복합재료를 피부처럼 얇게 패터닝함으로써 전체 시스템의 밀도 분포를 능동적으로 제어하는 데 성공했다. 이 밀도 분포 제어 기술은 몸체의 극심한 변형 또는 프로펠러와 같은 추진기 없이도 종이처럼 얇은 임의의 구조가 나뭇잎이 팔랑거리는 듯한 수중 거동을 하며 원하는 위치로 이동할 수 있게 만들었다.
해당 기술은 밀리미터 수준의 작은 크기부터 수미터 이상의 대면적까지 광범위하게 활용될 수 있으며, 탐사 및 해양 환경 유지에 필요한 다양한 기능들을 집적시킬 수 있는 잠재성이 있다. 이러한 가능성을 보여주기 위해, 연구진은 소규모 물탱크에서, 기름 흡착 시트가 스스로 헤엄쳐서 기름 유출 구간에 도달하여 오염 물질을 제거해내는 개념을 선보였다. 아직은 배터리 및 전자회로 등을 탑재하지 못하고 있고, 유동이 있는 물속에서의 움직임 제어에 관한 연구 등이 필요하지만, 현재의 개념 연구를 발전시킨다면 수중 소프트 로봇의 새로운 가능성을 보여줄 것으로 기대된다.
연구책임자인 서울대 조규진 교수는 “이 연구는 얇은 소프트 로봇이 수중에서 나뭇잎의 움직임과 유사한 새로운 형태의 거동을 할 수 있는 개념을 처음으로 보여준 연구로 앞으로 이 개념을 발전시켜 나간다면 해양 오염, 쓰레기 등을 제거할 수 있는 새로운 형태의 수중 소프트 로봇을 개발할 수 있는 가능성을 보여주었다”라고 전하며 연구의 의의를 밝혔다.
본 연구는 한국연구재단의 선도연구센터 사업 및 기초연구사업 학문후속세대양성 사업의 지원을 받아 수행됐다.
[참고자료]
1. 그림설명
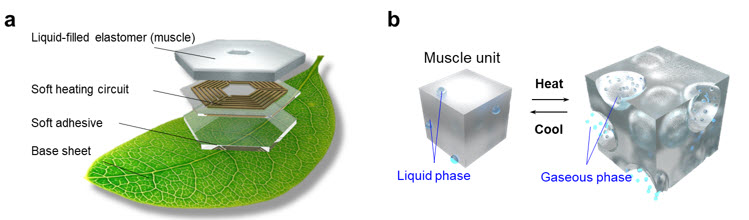
▲ a, 연구팀이 개발한 피부 형태의 부력 제어 기술 및 이를 활용한 헤엄치는 나뭇잎 모식도. b, 부력 제어 원리. 탄성 중합체(외력의 영향을 많이 받는 고분자 화합물) 내부에 끓는점이 낮은 기체를 삽입한 구조를 제작하여 열에 반응하여 큰 부피 변화를 만들어내어 부력을 제어함.
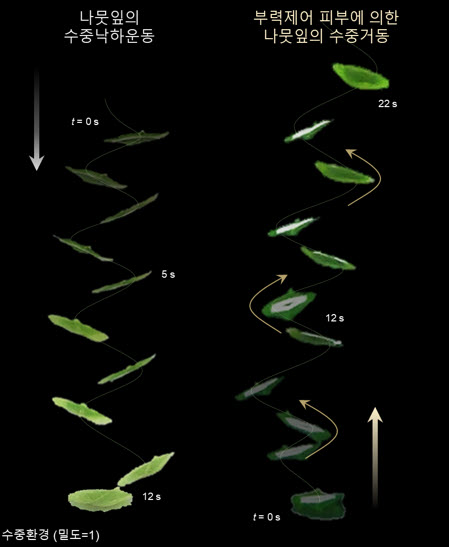
▲ 나뭇잎의 팔랑거리는 낙하운동에서 영감을 받아 제작된 나뭇잎 로봇의 수중 거동
2. 유튜브 영상 확인
https://youtu.be/M5XtojuUSBs
3. 논문명 및 저자
- 논문명: Underwater maneuvering of robotic sheets through buoyancy-mediated active flutter
- 저자: 조규진 교수(교신 저자, 서울대), 변정환 박사(제1저자, 서울대, 독일 막스플랑크 연구소), 박민조(서울대), 백상민(서울대), 윤재영(서울대), 김웅배(서울대), 이병문 박사(서울대), 홍용택 교수(서울대)
[문의사항]
서울대학교 공과대학 기계공학부 조규진 교수 / 02-880-1679 / kjcho@snu.ac.kr