
- 융합연구를 통한 의도 파악 및 신체 증강의 실용화 -
(개요) 서울대학교 체육교육과(안주은 교수), 서울대학교 기계공학부(조규진 교수), 카이스트 전산학부(조성호 교수), 분당서울대학교병원(공현식 교수)의 융합연구로 물건을 단단히 쥐고자 하는 의도를 단 하나의 센서만으로 파악하여 효과적으로 도와주는 장갑이 개발되었다.
(배경) 일상생활 속에서 무거운 물건을 들거나 망치나 드릴, 톱 같은 공구를 다뤄야 할 때, 손의 악력은 안정적인 작업 수행을 위해 매우 중요하다. 특히 화재와 같은 재난 현장이나 여러 가지 전동공구를 사용하는 작업현장에서 도구나 물건을 단단히 쥐는 동작이 빈번히 요구되지만, 이러한 동작을 오래 지속할 경우 팔 근육에 피로가 쌓이며 이로 인해 안정적인 작업 수행이 어려워진다. 실제로 National Fire Protection Association에서는 안전한 화재 진압 및 생명구조를 위해 소방관들의 악력을 측정하고 이를 일정 수준 이상으로 유지할 것을 제시하고 있다.
https://www.firerescue1.com/health/articles/what-do-the-nfpa-1582-physical-fitness-requirements-say-O7AnVpUgU22nrYIA/
(결과 및 독창성) 개발된 장갑의 기본적 원리는 힘을 주고자 할 때 근육을 중심으로 발생하는 전기적인 신호인 근전도를 감지하여 동작의 의도를 파악하는 것이다. 이러한 근전도를 이용한 의도 파악은 의족이나 의수를 제어하는데 주로 사용되어 왔으나 장갑과 같은 착용형 로봇에 적용하는 데에는 많은 어려움이 있었다. 우선 정확한 의도 파악을 위해 여러 개의 근전도 센서를 여러 근육에 부착시켜 사용해야 하는데 이러한 근육의 위치는 사람마다 다르고 동작을 수행하는 과정에서 센서가 조금이라도 원래의 위치에서 벗어나면 의도 파악이 부정확해진다. 또한 팔을 펴거나 굽히는 자세의 변화에 의해 의도 파악 성능이 저하되는 문제도 있다. 융합 연구팀은 큰 악력을 내고자 할 때만 손목 부근에서 큰 근전도 신호가 감지되는 현상을 발견하고 이를 이용하여 장갑형 로봇을 직관적으로 제어하는 방법을 개발하였다.
그 결과 여러 개의 센서에 의존하는 기존의 방식과는 전혀 달리 단 하나의 센서를 손목 부분에 밀착시키는 것만으로 큰 악력을 내고자 하는 의도를 정확히 파악할 수 있었으며 그 성능은 팔의 각도 등 자세 변화에 무관하게 높게 유지되었다. 심지어 새로 개발된 로봇 장갑의 의도 파악 성능은 5개의 센서를 팔뚝 주위의 여러 근육에 부착시켜 의도를 파악하는 기존의 방법보다도 우수하게 나타났다.
(의의) 본 연구의 성과는 인체와 관련된 새로운 발견과 운동학적 실험, 기계학습, 소프트 로봇제작 등 여러 분야에 걸친 전문성의 융합을 통한 미래 기술 개발의 사례이다. 특히, 단일 센서만으로 정확한 의도 파악 및 악력 증강이 가능함을 보여준 연구결과는 앞으로 신체 능력 증강을 위한 실용적인 착용형 로봇의 개발에 중요한 기여를 할 것으로 예상된다. 서울대학교 천상희 연구원이 주저자로 작성한 관련 논문은 IEEE Transactions on Medical Robotics and Bionics 2월호에 정식 게재될 예정이며 현재 미국전기전자학회(IEEE) 사이트를 통해 열람 가능하다.
https://ieeexplore.ieee.org/document/9305235
(연구기관) 본 연구를 수행한 인간중심소프트로봇기술연구센터(센터장: 서울대학교 조규진 교수)는 2016년부터 기계공학, 전산공학, 의학, 의류학, 운동역학을 포함한 다양한 학문분야의 융합연구를 통해 인간의 운동 능력 증진을 위한 다양한 착용형 소프트 로봇을 개발하고 있다.
연구결과
Single EMG Sensor-Driven Robotic Glove Control for Reliable Augmentation for Power Grasping
Sangheui Cheon, Daekyum Kim, Sudeok Kim, Brian Byunghyun Kang, Jongeun Lee, Hyun Sik Gong, Sungho Jo, Kyu-Jin Cho*, and Jooeun Ahn*
(IEEE Transactions on Medical Robotics and Bionics, in press)
착용형 로봇을 상용화하기 위해서는 직관적이고 편리한 조작이 가능해야한다. 사용자의 의도를 바로 파악하여 인간의 움직임을 도와주는 착용형 로봇을 만들기 위해 근전도 신호를 이용한 제어기술이 개발되어 왔으나, 정확한 의도 파악을 위해서는 여러 개의 센서를 통한 기계학습이 필요하고 이러한 요구사항은 착용형 로봇을 실용화하는데 있어 커다란 장애요소로 작용한다. 여러 개의 센서를 이용할 경우 사람마다 다른 신체 형상 때문에 센서의 위치를 특정하기 위해 많은 시간과 노력이 소요되며 실제 작업 시 센서의 위치가 처음 특정한 위치와 달라질 경우 의도 파악의 성능이 현저히 떨어지기 때문이다.
본 연구팀은 큰 악력을 내고자 할 때만 손목 부근에서 큰 근전도 신호가 감지되는 현상을 새롭게 발견하고 기계학습을 통해 간단하지만 정확한 의도 파악 방법을 개발하여 이를 장갑형 로봇에 적용하였다. 그 결과 여러 개의 센서에 의존하는 기존의 방식과는 달리 단 하나의 센서를 손목 부분에 밀착시키는 것만으로 큰 악력을 내고자하는 의도를 정확히 파악할 수 있었으며 그 성능은 팔의 각도 등 자세 변화에 무관하게 높게 유지되었다. 새로 개발된 로봇 장갑의 의도 파악 성능은 심지어 5개의 센서를 팔뚝 주위의 여러 근육에 부착시켜 의도를 파악하는 기존의 방법보다도 우수하게 나타났다. 또한 연구팀은 단일 센서에서 감지하는 근전도 신호를 모스 부호처럼 이용하여 큰 악력을 의도하는 순간에 악력을 증강시키는 직관적인 조작 외에도 증강된 악력을 임의의 기간 동안 손에 힘을 주지 않고도 유지하는 조작 등 다양한 명령을 내릴 수 있는 제어 방법을 개발하였다
용어설명
1. 근전도(Electromyography)
○ 근전도는 근육이 수축하여 힘을 내기 직전에 발생하는 전기적인 신호로 근전도 신호의 크기는 근육이 얼마나 활성화 되었는지를 평가하는 척도가 된다. 일반적으로 피부에 부착하는 비 침습 센서를 이용하여 간단히 측정 가능하다. 근전도 신호는 근력이 생기기 직전에 관찰되기 때문에 움직임의 의도를 파악하는 데 사용될 수 있다. 단, 보통 인체는 한 가지 동작을 수행하기 위해 여러 근육을 사용하기 때문에 정확한 의도 파악을 위해서는 여러 개의 근전도 센서를 여러 근육에 부착하는 방법이 일반적으로 이용된다.
그림설명
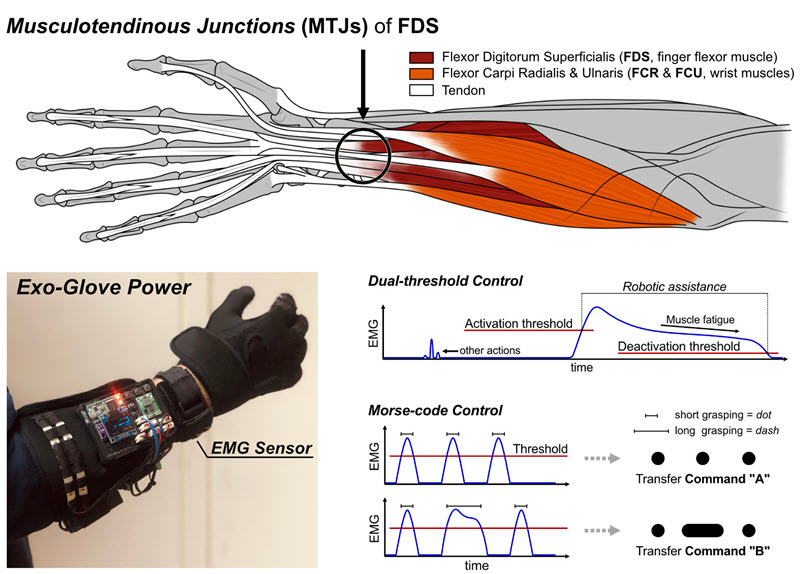
흔히 근육 중심부에 부착한 센서를 통해 감지한 근전도(EMG) 신호는 근육의 활성화 정도를 파악하거나 움직임 의도를 규명하는데 사용된다. 본 연구에서는 선행연구들과 달리 근육 중심부가 아닌 천지굴곡근(Flexor digitorum superficialis, FDS)의 힘줄-근육 접합부(Musculotendinous Junction)에서 나오는 근전도 신호를 사용하였다. 이 위치에서 나오는 신호를 통하여 사용자가 물체를 단단히 쥐려는 의도를 하나의 센서만으로 감지할 수 있으며, 감지 성능은 기존 방식과는 다르게 팔의 자세에 영향을 받지 않고 5개의 센서를 전완 근육에 부착한 경우보다도 우수하다. 이를 바탕으로 장갑형 로봇을 직관적으로 조작할 수 있는 방법을 고안하였다.