
서울대 공대는 인간중심 소프트 로봇기술 연구센터장을 맡고 있는 기계항공공학부 조규진 교수와 카이스트 조성호 교수의 공동 연구팀(공동 1저자: 김대겸(카이스트)∙강병현 연구원(서울대), 공동 저자: 하지수(카이스트), 최형민, 김규범(서울대) 연구원, 교신저자: 조규진∙조성호 교수, 디자이너: 송정률 연구원)이 딥러닝을 사용한 웨어러블 장갑 로봇의 새로운 의도 예측 방법론을 개발했다고 31일 밝혔다.
기존에 연구팀이 개발한 ‘엑소 글로브’는 손을 못 움직이는 장애인을 도와주는 장갑형 웨어러블 로봇이다. 이번 연구로 생체신호와 센서를 통해 사용자의 의도를 측정했던 기존 방식에서 벗어나, 데이터화한 기계학습을 통해 카메라만을 사용해 사용자가 물체를 잡고자 하는 의도를 파악할 수 있게 됐다.
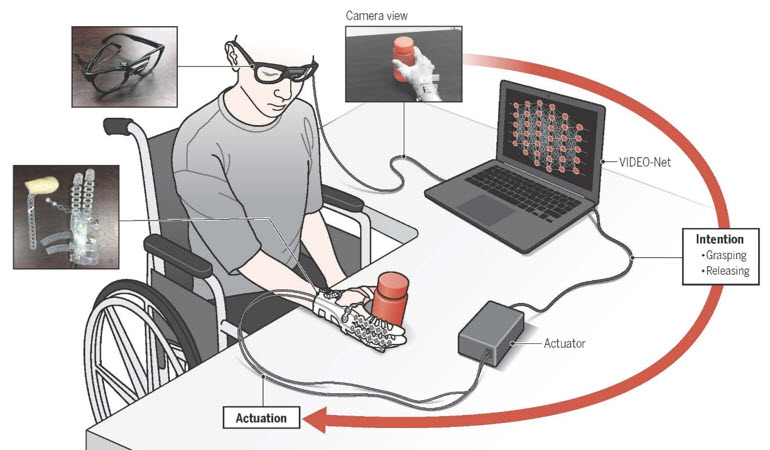
머신 러닝이 작동하는 과정
연구팀은 행동 패턴을 분석해 의도를 예측하는 딥러닝 모델인 ‘비디오넷’을 제시했다. 안경에 부착된 카메라를 활용해 의도를 파악하는 비디오넷은 척추 손상 장애인의 손과 물체의 상관관계를 파악하는 공간 정보와, 팔의 움직임을 파악하는 시간 정보로 구성된다. 사람과 로봇이 마치 하나의 인격을 가진 객체처럼 동기화되기 때문에, 기존의 웨어러블 장갑 로봇과 달리 사용자의 의도를 전달하기 위해 별도로 버튼을 누를 필요가 없다.
서울대 조규진 교수는 “아직까지 소프트웨어러블 로봇에 카메라를 사용해 사용자의 의도를 파악하는 기술을 적용한 사례가 없었다”며, “이 기술을 사용하면 외상성 척추손상(spinal cord injury)으로 인해 손을 사용하지 못하는 장애인이 아무런 도움 없이 카페에서 커피를 마시고 음식을 먹는 것이 가능하다”고 전했다.
이번 연구 성과는 세계적으로도 인정받아 사이언스 로보틱스(Science Robotics)에 포커스 논문으로 실렸다.
조규진 교수
인간중심소프트로봇기술연구센터(ERC)장. 2014년 소프트로봇과 생체모사로봇 설계 분야 성과를 인정받아 '국제로봇학회 젊은 연구자상(IEEE RAS Early Career)'을 받았다. 2015년 서울공대 최초로 <사이언스> 저널에 실린 '소금쟁이 로봇'을 개발했다. 2016년에는 전미과학진흥협회(AAAS) 연례대회에서 장애인의 일상생활을 돕는 장갑형 소프트로봇 '엑소 글로브 폴리(Exo-Glove Poly)'를 공개해 화제를 모았다. 같은 해 4월, 이탈리아 피사에서 세계 최초로 열린 ‘소프트로봇챌린지’에서 ‘스누맥스’로 우승했다.